
图论之最短路
Floyd,Dijkstra, Spfa
- Dijkstra:适用于权值为非负的图的单源最短路径,用斐波那契堆的复杂度O(E+VlgV)
- BellmanFord:适用于权值有负值的图的单源最短路径,并且能够检测负圈,复杂度O(VE)
SPFA:适用于权值有负值,且没有负圈的图的单源最短路径,SPFA的最坏情况应该是O(VE).
Floyd:每对节点之间的最短路径
(E为边个数,V为顶点个数)

其中N表示点数,M表示边数
Floyd 算法虽然总体上时间复杂度较高,但可以处理带负权边的图(但不能有负权回路),并且均摊到每一点对上,在所有的算法中还是属于比较优秀的算法。另外,floyd算法较小的编码复杂度也是一大优势,所以,如果要求的是所有点对间的最短路径,或者如果数据范围较小,则floyd算法比较合适。
Dijkstra算法最大的弊端就是他无法处理带有负权边以及负权回路的图,但是Dijkstra算法具有良好的可扩展性,扩展后可以适应很多问题。另外用堆优化的Dijkstra算法的时间复杂度可以达到O(M log N)。当边有负权,甚至存在负权回路时,需要使用Bellman-ford 算法或者队列优化的Bellman-ford算法,因此我们选择最短路径法时,根据实际的需求和每一种算法的特性,选择合适的算法来使用。
参考:https://blog.csdn.net/yuewenyao/article/details/81023035
Floyd(多源最短路)
Floyd算法用于求每一对顶点之间的最短路径,3个for循环就可以。时间复杂度O(v^3) 。v为图顶点个数
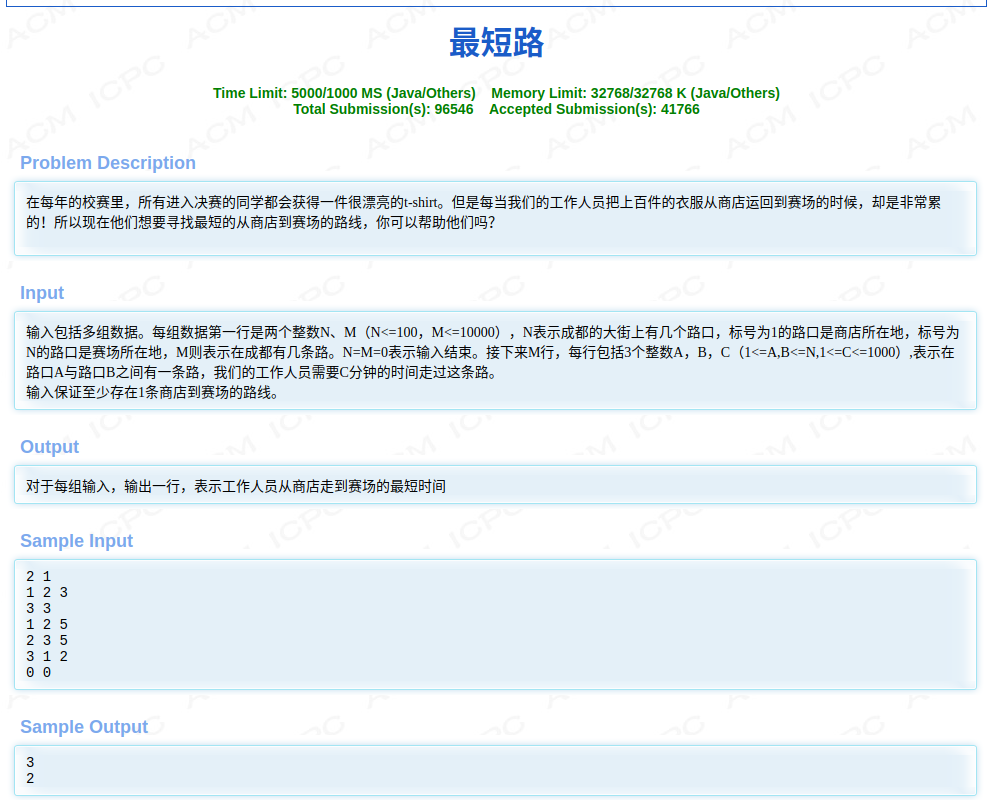
模板题:HDU2544-最短路
1 | /* |
Dijkstra(单源最短路)
不采用最小优先队列,时间复杂度是O(v^2),v为图顶点个数
1 | /* |
Spfa
邻接表,队列优化
1 | /* |
本博客所有文章除特别声明外,均采用 CC BY-NC-SA 4.0 许可协议。转载请注明来源 GreenHatHGのBlog!
相关推荐

2025-12-18
牛客283H-Dij-链式向前星-快速幂
Dijkstra—链式向前星—快速幂 题目链接:牛客283H-图论一顿套模版 解析题目求的是乘积,但是又因为W一定是2的整数次幂。所以我们可以将乘法换为加法,2^x * 2^y = 2^(x+y) 只要我们求出x+y的最小值,那么对应其答案也是最小值。算2^x可以运用快速幂解决 所以总体上我们可以用dij+优先队列优化+链式向前星+快速幂解决 123456789101112131415161718192021222324252627282930313233343536373839404142434445464748495051525354555657585960616263646566676869707172737475767778798081828384858687888990919293949596979899100101102103104105106107/*运行时间(ms) 使用内存(KB) 代码长度 使用语言 提交时间62 4188 1543 C++ 2019-03-28 10:53:59*/#include <cs...

2025-12-18
L2-001紧急救援-dijkstra变形-记录路径
L2-001紧急救援 题目L2-001紧急救援 解析123456789101112131415161718192021222324252627282930313233343536373839404142434445464748495051525354555657585960616263646566676869707172737475767778798081828384858687888990919293949596979899100101102103104105106107108109110111112/*2019/2/22 17:08:1056ms*/#include <bits/stdc++.h>using namespace std;const int MAXN = 1e3;const int INF = 0X3F3F3F3F;int edge[MAXN][MAXN]; int vis[MAXN] = {0}; int dis[MAXN];int num[MAXN]; //存每个点救援人员数量int path[MAXN]; //存储路径,...

2025-12-18
HDU1217-Arbitrage-Flody变形
HDU1217-Arbitrage HDU12171Time Limit: 2000/1000 MS (Java/Others) Memory Limit: 65536/32768 K (Java/Others) Problem Description Arbitrage is the use of discrepancies in currency exchange rates to transform one unit of a currency into more than one unit of the same currency. For example, suppose that 1 US Dollar buys 0.5 British pound, 1 British pound buys 10.0 French francs, and 1 French franc buys 0.21 US dollar. Then, by converting currencies, a clever trader can start with 1 US dollar a...
2025-12-18
图着色问题
洛谷P2819图的m着色问题, POJ 1129 Channel Allocation 模板题—洛谷P2819图的m着色问题 123456789101112131415161718192021222324252627282930313233343536373839404142434445464748495051525354/*代码 C++11,0.77KB提交时间 2019-04-04 15:54:31耗时/内存277ms, 888KB*/#include <cstdio>using namespace std;const int MAXN = 1E3;bool gra[MAXN][MAXN] = {false}; //判断两个点是否连通int color[MAXN] = {0}; //存每个点已经涂成的颜色,值为0则是没有被涂色int n, k, m, e1, e2, ans = 0;bool check(int num){ for(int i = 1; i <= num; i++) {...

2025-12-18
HDU1518-Square-DFS
HDU1518—-Square 题目链接:HDU1518 分析参考:https://blog.csdn.net/guodongxiaren/article/details/23126997 题意就是好多棍子,看能不能拼成正方形。主要注意的有几点: 所有棍子都要用到,不能剩余 输入已经保证大于4根棍子了。所以无需判断可能小于3根棍子的情况 棍长的总数首先要是4的倍数,才能进行。否则直接输出 “no” 当前面前提满足以后,再满足3 根棍子拼好,就完工了。最后一根一定能拼好。 解法就是运用dfs方法不断尝试,当一个结果不符合题意时,就回溯到上一个结果。 此外,我们还可以提前对数据进行排序,将数据从大到小排序,以提高查找速率。 123456789101112131415161718192021222324252627282930313233343536373839404142434445464748495051525354555657585960616263646566676869707172737475/*421MS 1320K2019-04-12 22:40:37*/#inc...
2025-12-18
图论之最小生成树
prim算法,kruskal算法,POJ1251入门题目 参考:https://blog.csdn.net/qq_40306845/article/details/81540626 模板题目poj1251—Jungle Roads 题意:给你n个点,右n-1条边,每个边都有一个权值,让你求出最小生成树 题目说明不含重复边 prime 先任意选择一条边(一般直接选择第一条),连接与其相连权值最小的点,然后两个点成为一个集合体。 找这个不在这个集合体里 但是与集合体相连的权值最小的点 与集合体相连,并把该点归入集合体。 重复上一条操作,直到集合体归入了所有的点 时间复杂度 记顶点数v,边数e 邻接矩阵:O(v2) 邻接表:O(elog2v) 1234567891011121314151617181920212223242526272829303132333435363738394041424344454647484950515253545556575859606162636465666768697071727374#include <iost...
评论

